Steps to run AVR program on AtmelStudio simulator and log register values.
Steps to run AVR program on AtmelStudio simulator and log register values.
ATmega328P Timer/Counter0 fast PWM period and duty cycle.
How interrupts work on ATmega328P.
Summary of Timer/Counter0 on ATmega328P.
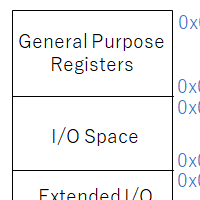
An overview of ATmega328P memory summarized from the datasheet.
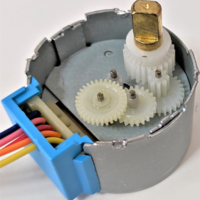
Stepper motor 28BYJ-48 was disassembled to understand how it works.
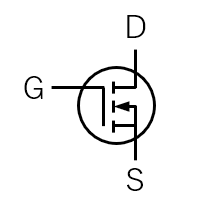
Types and symbols of transistors and their behavior.

Comparison of VL53L1X breakout boards.
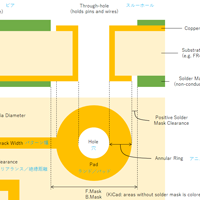
プリント基板に関する用語とそれらが指す物・寸法のまとめ。
unicraftで基板発注する際のKiCadの設定。

USB Power Bank for Raspberry Pi
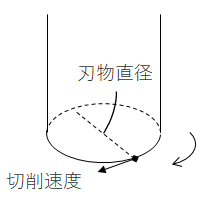
卓上CNCでアルミを切削するときの条件。
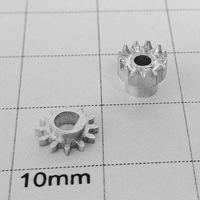
How to make gears from scratch with desktop CNC.
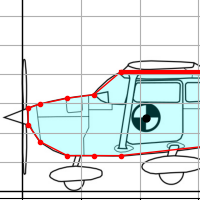
DATCOM tutorial with Cessna example.

ZYX Euler angles to rotation matrix and back.
ZXY Euler angles to rotation matrix and back.

Methods to convert quaternion to rotation matrix.
Method to generate polynomial trajectory with wall constraint with QP.

Method to generate polynomial trajectory with QP.
Method to generate quintic polynomial trajectory.
Motor mixer theory for multirotor.
Time constant of low pass filter code.

2000円のラジコンヘリを分解。回路を分析。コントローラーとの赤外線信号の解読など。
Pre and post multiplication of rotation matrices and quaternions.
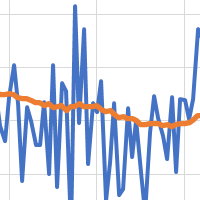
Input and output of Fast Fourier Transform. Units and vector length.
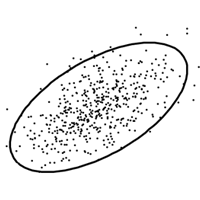
How to draw ellipse of covariance matrix.
Covariance and correlation formulas as well as conversion between the two.
6 point calibration method.
Different calibration methods.
Quaternion-based extended kalman filter with gyro bias.
Kalman filter for 1D motion with acceleration and bias.
Kalman filter for 2D motion.
Kalman filter for 1D motion with acceleration.
Kalman filter for 1D motion.
Quaternion-based extended kalman filter.
Replace non-break space with regular spaces.
ノーブレークスペースを半角スペースに置き換え

Blink Arduino's on-board LED with Atmel Studio 7.
How to use C++ global functions.
About Windows character string types: LPSTR, LPCSTR, LPWSTR, LPCWSTR, etc.
How to use C++ static const member variables of different types.

Integer, string, array, loop, function, etc.

Python snippets for controls engineering.
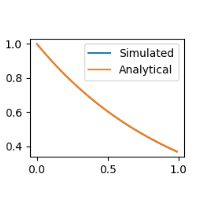
How to implement 1st order low pass filter
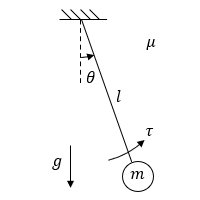
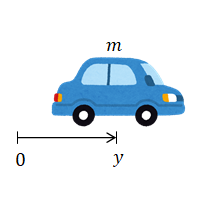
Pendulum dynamics and simulation
Estimating transfer function from only its input and output data
Step response from input/output data
Methods to simulate systems
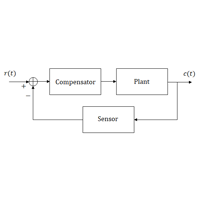
Steps to design a controller
Math and effects of each term.
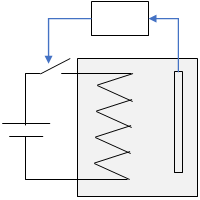
System to control room temperature is shown.
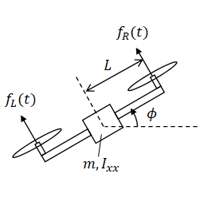
Quadrotor PD control in 2D with simulation.
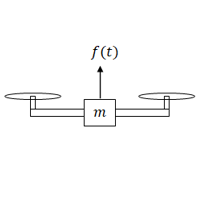
Quadrotor PD height control and simulation.
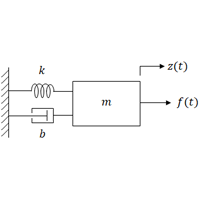
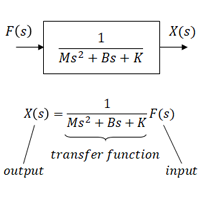
Mass spring damper system. Transfer function, block diagram, state space model.
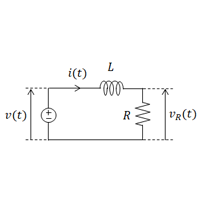
Series resistor inductor circuit system. Transfer function, block diagram, state space model.
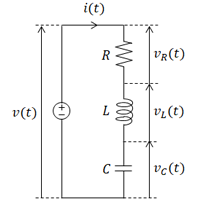
Series resistor inductor capacitor circuit system. Transfer function, state space model.
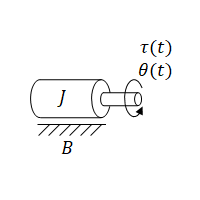
Torsional friction system. Transfer function, block diagram, state space model.
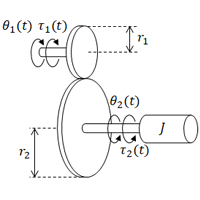
Gears system. Transfer function, block diagram, state space model.

Permanent magnet DC motor system. Transfer function, block diagram, state space model.
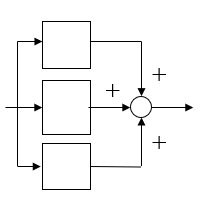
How to construct transfer function from block diagram and vice versa.
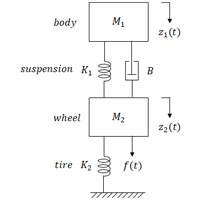
Car suspension system. Transfer function, block diagram, state space model.
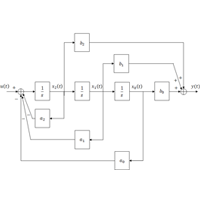
Control and observer canonical forms for 1st, 2nd and 3rd order systems.
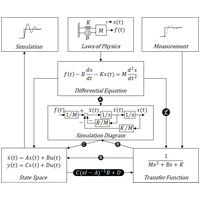
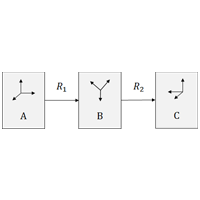
Control system representations and conversion between them.
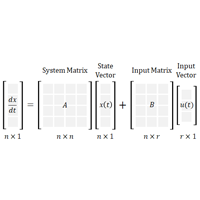
State space model. How to choose variables. How to simulate.
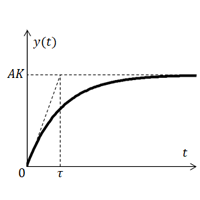
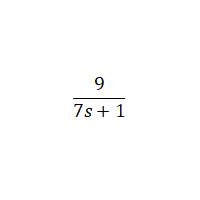
First order system response formula. Step and frequency responses.
Determine frequency response of known system.
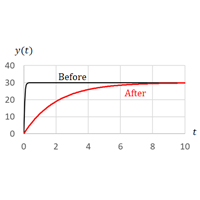
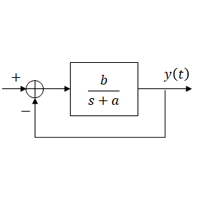
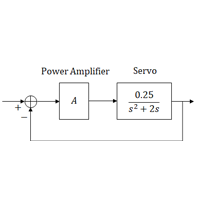
Modify a given system to respond faster.
Modify a given system to reach steady state after 8 sec.
Determine system model from step response measurement.
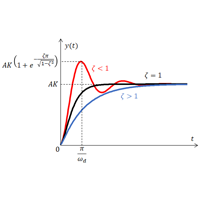
Second order system response. Step and frequency responses.
Modify a given system to respond faster.
Design a system with fastest response and no overshoot.
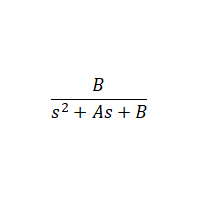
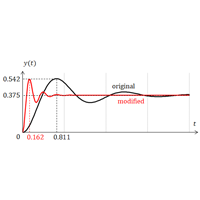
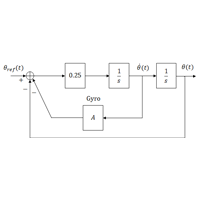
Design a system to overshoot a little.
Design a system with fastest response and no overshoot. Analyze failure scenario.
System error and unity feedback.
System identificatin of first order system.
System identificatin of second order system.