This is a summary of different methods to calibrate an accelerometer. Units are in G.
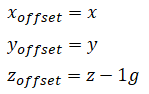
This method requires the device to be positioned in only one orientation. The device must be placed on a flat surface that is not tilted.
Steps to compute calibration parameters
Method to compute calibrated values from raw measurements
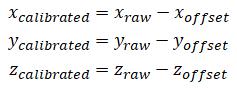
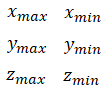
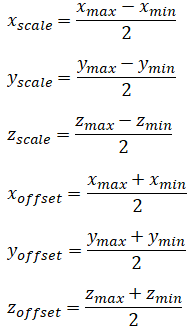
This method requires the device to be rotated to find its maximum and minimum values.
Steps to compute calibration parameters
Method to compute calibrated values from raw measurements
This method requires the device to be positioned in six different orientations. The device must have 6 perpendicular sides and be placed on a flat surface that is not tilted.
The following calibration model is used:
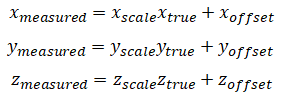
where xmeasured ymeasured zmeasured are the raw measured values from the accelerometer and xtrue ytrue ztrue are the real acceleration experienced by the device (a.k.a calibrated values). xscale yscale zscale xoffset yoffset zoffset are calibration parameters.
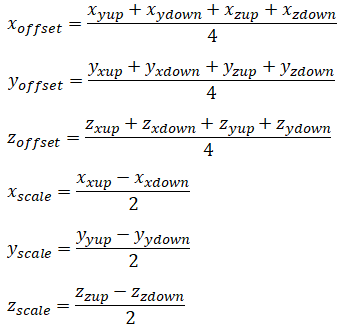
Steps to compute calibration parameters
Method to compute calibrated values from raw measurements
# Measurements for calibration xup_x , xup_y , xup_z = 1.2, 0.0, 0.1 xdown_x, xdown_y, xdown_z = -1.0, 0.0, 0.1 yup_x , yup_y , yup_z = 0.1, 1.1, 0.1 ydown_x, ydown_y, ydown_z = 0.1, -1.1, 0.1 zup_x , zup_y , zup_z = 0.1, 0.0, 1.1 zdown_x, zdown_y, zdown_z = 0.1, 0.0, -0.9 # Calibration parameters offset_x = (yup_x + ydown_x + zup_x + zdown_x) / 4 offset_y = (xup_y + xdown_y + zup_y + zdown_y) / 4 offset_z = (xup_z + xdown_z + yup_z + ydown_z) / 4 scale_x = (xup_x - xdown_x) / 2 scale_y = (yup_y - ydown_y) / 2 scale_z = (zup_z - zdown_z) / 2 # Calibrated values raw_x = xup_x raw_y = xup_y raw_z = xup_z calibrated_x = (raw_x - offset_x) / scale_x calibrated_y = (raw_y - offset_y) / scale_y calibrated_z = (raw_z - offset_z) / scale_z print(calibrated_x) print(calibrated_y) print(calibrated_z)
Output
0.9999999999999998 0.0 0.0
This method requires the device to be positioned in six different orientations. The device must have 6 perpendicular sides and be placed on a flat surface that is not tilted.
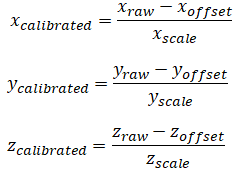
The following calibration model is used:
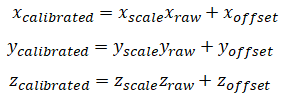
where xraw yraw zraw are the raw measured values from the accelerometer and xcalibrated ycalibrated zcalibrated are the calibrated values. xscale, yscale, zscale, xoffset yoffset zoffset are calibration parameters.
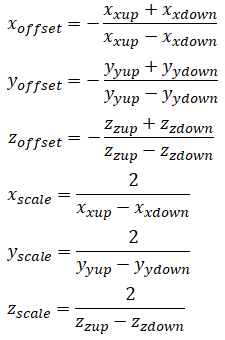
Steps to compute calibration parameters
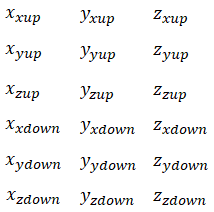
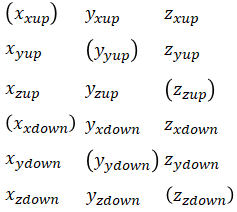 Only the 6 measurements in brackets are used to calculate the parameters
Only the 6 measurements in brackets are used to calculate the parameters
Method to compute calibrated values from raw measurements
# Measurements for calibration xup_x , xup_y , xup_z = 1.2, 0.0, 0.1 xdown_x, xdown_y, xdown_z = -1.0, 0.0, 0.1 yup_x , yup_y , yup_z = 0.1, 1.1, 0.1 ydown_x, ydown_y, ydown_z = 0.1, -1.1, 0.1 zup_x , zup_y , zup_z = 0.1, 0.0, 1.1 zdown_x, zdown_y, zdown_z = 0.1, 0.0, -0.9 # Calibration parameters offset_x = -(xup_x + xdown_x) / (xup_x - xdown_x) offset_y = -(yup_y + ydown_y) / (yup_y - ydown_y) offset_z = -(zup_z + zdown_z) / (zup_z - zdown_z) scale_x = 2 / (xup_x - xdown_x) scale_y = 2 / (yup_y - ydown_y) scale_z = 2 / (zup_z - zdown_z) # Calibrated values raw_x = xup_x raw_y = xup_y raw_z = xup_z calibrated_x = scale_x * raw_x + offset_x calibrated_y = scale_y * raw_y + offset_y calibrated_z = scale_z * raw_z + offset_z print(calibrated_x) print(calibrated_y) print(calibrated_z)
Output
1.0 0.0 -2.7755575615628914e-17
This method requires the device to be positioned in six different orientations. The device must have 6 perpendicular sides and be placed on a flat surface that is not tilted.
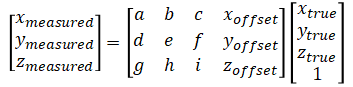
The following calibration model is used:
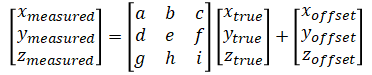
where [xmeasured ymeasured zmeasured] is the raw measured values from the accelerometer and [xtrue ytrue ztrue] is the real acceleration (a.k.a calibrated values). a~i and [xoffset yoffset zoffset] are calibration parameters.
Steps to compute calibration parameters
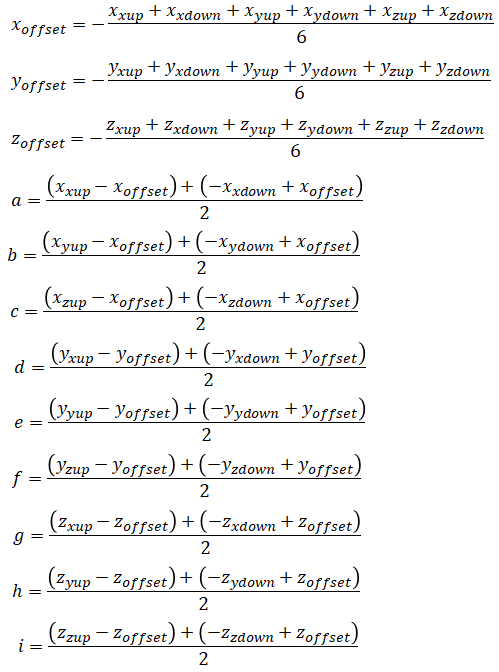
Method to compute calibrated values from raw measurements

import numpy as np # Measurements for calibration xup_x , xup_y , xup_z = 1.2, 0.0, 0.1 xdown_x, xdown_y, xdown_z = -1.0, 0.0, 0.1 yup_x , yup_y , yup_z = 0.1, 1.1, 0.1 ydown_x, ydown_y, ydown_z = 0.1, -1.1, 0.1 zup_x , zup_y , zup_z = 0.1, 0.0, 1.1 zdown_x, zdown_y, zdown_z = 0.1, 0.0, -0.9 # Calibration parameters offset_x = (xup_x + xdown_x + yup_x + ydown_x + zup_x + zdown_x) / 6 offset_y = (xup_y + xdown_y + yup_y + ydown_y + zup_y + zdown_y) / 6 offset_z = (xup_z + xdown_z + yup_z + ydown_z + zup_z + zdown_z) / 6 a = ((xup_x - offset_x) + (-xdown_x + offset_x)) / 2 b = ((yup_x - offset_x) + (-ydown_x + offset_x)) / 2 c = ((zup_x - offset_x) + (-zdown_x + offset_x)) / 2 d = ((xup_y - offset_y) + (-xdown_y + offset_y)) / 2 e = ((yup_y - offset_y) + (-ydown_y + offset_y)) / 2 f = ((zup_y - offset_y) + (-zdown_y + offset_y)) / 2 g = ((xup_z - offset_z) + (-xdown_z + offset_z)) / 2 h = ((yup_z - offset_z) + (-ydown_z + offset_z)) / 2 i = ((zup_z - offset_z) + (-zdown_z + offset_z)) / 2 # Calibrate raw values A = np.array([ [a, b, c], [d, e, f], [g, h, i] ]) raw = np.array([ [xup_x], [xup_y], [xup_z] ]) offset = np.array([ [offset_x], [offset_y], [offset_z] ]) calibrated = np.linalg.inv(A) @ (raw - offset) print(calibrated)
[[1.00000000e+00] [0.00000000e+00] [1.38777878e-17]]
This method requires the device to be positioned in any number of orientations. For each orientation, a true acceleration must be known.
The following calibration model is used:
where [xmeasured ymeasured zmeasured] is the raw measured values from the accelerometer and [xtrue ytrue ztrue] is the real acceleration (a.k.a calibrated values). a~i and xoffset yoffset zoffset are calibration parameters.
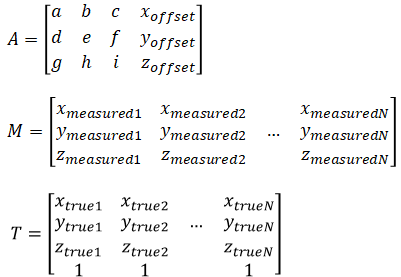
Steps to compute calibration parameters

 where A is 3x4 matrix (calibration parameters)
where A is 3x4 matrix (calibration parameters)
Method to compute calibrated values from raw measurements
import numpy as np # Measurements for calibration xup_x , xup_y , xup_z = 1.2, 0.0, 0.1 xdown_x, xdown_y, xdown_z = -1.0, 0.0, 0.1 yup_x , yup_y , yup_z = 0.1, 1.1, 0.1 ydown_x, ydown_y, ydown_z = 0.1, -1.1, 0.1 zup_x , zup_y , zup_z = 0.1, 0.0, 1.1 zdown_x, zdown_y, zdown_z = 0.1, 0.0, -0.9 measured = np.array([ [xup_x, xdown_x, yup_x, ydown_x, zup_x, zdown_x], [xup_y, xdown_y, yup_y, ydown_y, zup_y, zdown_y], [xup_z, xdown_z, yup_z, ydown_z, zup_z, zdown_z] ]) true = np.array([ [1, -1, 0, 0, 0, 0], [0, 0, 1, -1, 0, 0], [0, 0, 0, 0, 1, -1], [1, 1, 1, 1, 1, 1] ]) A = measured @ true.T @ np.linalg.inv(true @ true.T) # Calibrate raw values raw = np.array([ [xup_x], [xup_y], [xup_z] ]) calibrated = np.linalg.inv(A[:,:3]) @ (raw - A[:,3:4]) print(calibrated)
Output
[[1.00000000e+00] [0.00000000e+00] [1.38777878e-17]]
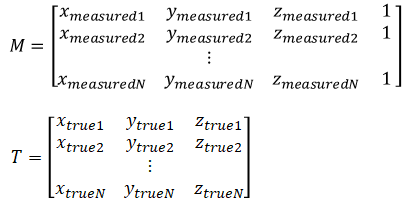
This method requires the device to be positioned in any number of orientations. For each orientation, a true acceleration must be known.
The following calibration model is used:
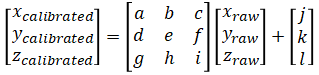
which can be rewritten as

where [xcalibrated ycalibrated zcalibrated] is the calibrated values and [xraw yraw zraw] is the raw accelerometer measurements. a~l are calibration parameters.
Steps to compute calibration parameters
 where X is 4x3 matrix (calibration parameters)
where X is 4x3 matrix (calibration parameters)
Method to compute calibrated values from raw measurements

import numpy as np # Measurements for calibration xup_x , xup_y , xup_z = 1.2, 0.0, 0.1 xdown_x, xdown_y, xdown_z = -1.0, 0.0, 0.1 yup_x , yup_y , yup_z = 0.1, 1.1, 0.1 ydown_x, ydown_y, ydown_z = 0.1, -1.1, 0.1 zup_x , zup_y , zup_z = 0.1, 0.0, 1.1 zdown_x, zdown_y, zdown_z = 0.1, 0.0, -0.9 measured = np.array([ [xup_x , xup_y , xup_z , 1], [xdown_x, xdown_y, xdown_z, 1], [yup_x , yup_y , yup_z , 1], [ydown_x, ydown_y, ydown_z, 1], [zup_x , zup_y , zup_z , 1], [zdown_x, zdown_y, zdown_z, 1] ]) true = np.array([ [ 1, 0, 0], [-1, 0, 0], [ 0, 1, 0], [ 0, -1, 0], [ 0, 0, 1], [ 0, 0, -1] ]) X = np.linalg.inv(measured.T @ measured) @ measured.T @ true # Calibrate raw values raw = np.array([ [xup_x, xup_y, xup_z, 1] ]) calibrated = raw @ X print(calibrated)
Output
[[ 1.00000000e+00 0.00000000e+00 -1.38777878e-17]]