


This page describes a method to estimate position and velocity in 1D given position and velocity measurements from devices like GNSS. Kalman filter with constant velocity model is used. A working Python code is also provided.
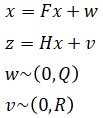
Given system and measurement equations,
Discrete-time Kalman filter steps are,
| 1. | Prediction: state | |
| 2. | Prediction: covariance | |
| 3. | Innovation | |
| 4. | Innovation: covariance | |
| 5. | Kalman gain | |
| 6. | Update: state | |
| 7. | Update: state | |
State vector is:

The first parameter is position (m) and the second parameter is velocity (m/sec).
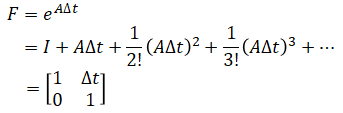
State transition matrix F is needed to predict the state and covariance. F is a 2x2 matrix given by:
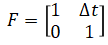
F is derived as follows:
Constant velocity model is given by,

Let

then the equation of motion in state-space form is
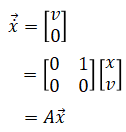
where A is the system matrix (continuous). Above can be discretized as
Process noise is a 2x2 matrix and is assumed to be zero:
Upper left value is position variance and lower right is velocity variance.
There are two types of observations: position and velocity (both scalar).
The measurement equation for position observation is,
so the observation model is
The measurement equation for velocity observation is,
so the observation model is
It is possible to set up measurement equation for both position and velocity observations at the same time:
Updating the position and then the velocity separately is the same as updating them at the same time using the above equation.
Observation noise is given by,

σx is 1-standard deviation position error (positional accuracy estimate) in m obtained from GNSS receiver (often called eph).
σv is 1-standard deviation speed error (speed accuracy estimate) in m/sec obtained from GNSS receiver (often called sAcc).
filter.py
import numpy as np class KF: def __init__(self, x0=0, v0=0, x0_acc=0.5, v0_acc=0.5): ''' x0 -- initial position [m] v0 -- initial velocity [m/sec] x0_acc -- initial position accuracy (1-standard deviation) [m] v0_acc -- initial velocity accuracy (1-standard deviation) [m/sec] ''' self.x = np.array([[x0], [v0]]) # State self.P = np.diag([x0_acc ** 2, v0_acc ** 2]) # Covariance self.Q = np.zeros((2, 2)) # Process noise def predict(self, dt): ''' dt -- time step [sec] ''' F = np.array([ [1, dt], [0, 1] ]) self.x = F @ self.x self.P = F @ self.P @ F.T + self.Q def update(self, z, H, R): y = z - H @ self.x S = H @ self.P @ H.T + R K = (self.P @ H.T) @ np.linalg.inv(S) self.x = self.x + K @ y self.P = (np.identity(2) - K @ H) @ self.P def update_pos(self, pos, pos_acc): ''' pos -- position measurement [m] pos_acc -- position measurement accuracy (1-standard deviation) [m] ''' z = np.array([[pos]]) H = np.array([ [1, 0] ]) R = np.array([[pos_acc ** 2]]) self.update(z, H, R) def update_vel(self, vel, vel_acc): ''' vel -- velocity measurement [m/sec] vel_acc -- velocity measurement accuracy (1-standard deviation) [m/sec] ''' z = np.array([[vel]]) H = np.array([ [0, 1] ]) R = np.array([[vel_acc ** 2]]) self.update(z, H, R)
True vs estimated values are compared using simulated sensor data.
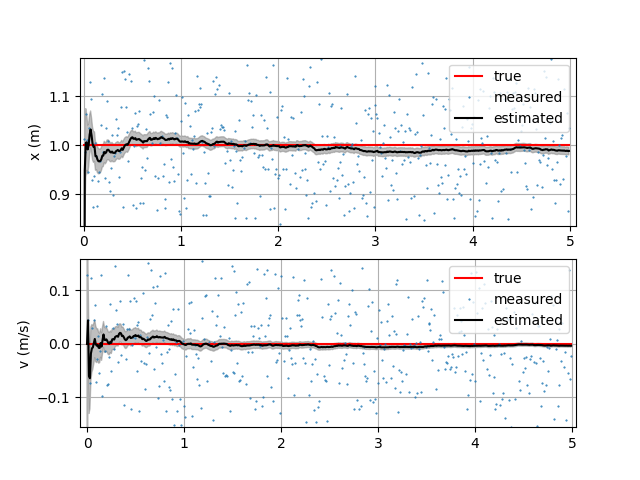
Target is not moving and is fixed at x=1m position. Position error starts large, decreases, and converges to a value. Velocity error keeps decreassing due to zero process noise.
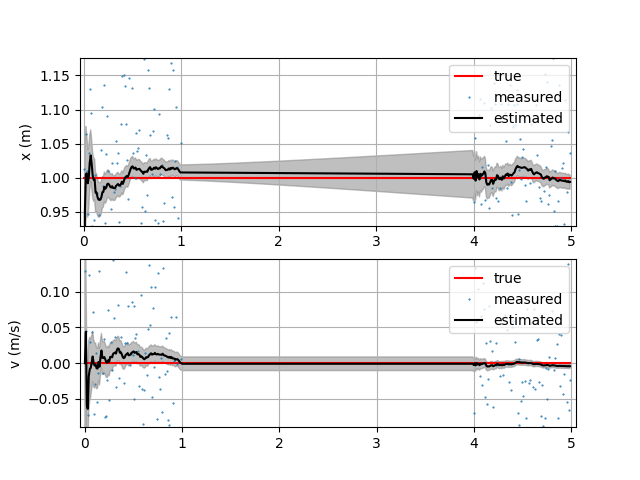
Target is not moving and there is no measurement between 1 to 4 seconds. This is the case when GNSS is temporarily unavailable due to environmnetal factors. Position error increases while there is no measurement. Velocity error is constant (due to zero process noise) while there is no measurement. Velocity error diminishes once data is available.
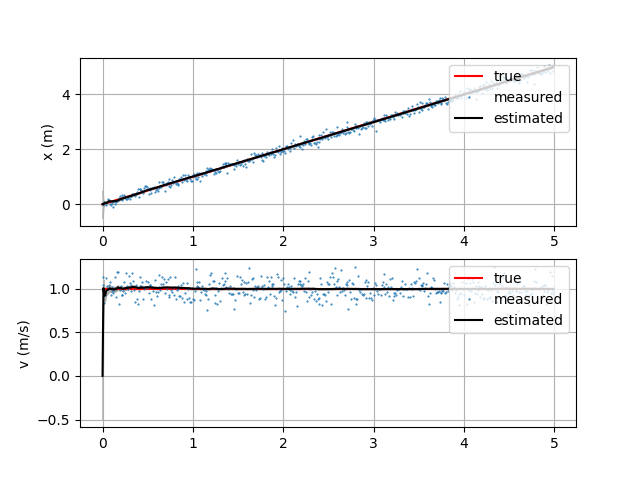
Target moves at a constant speed of 1m/sec. There is no problem tracking.
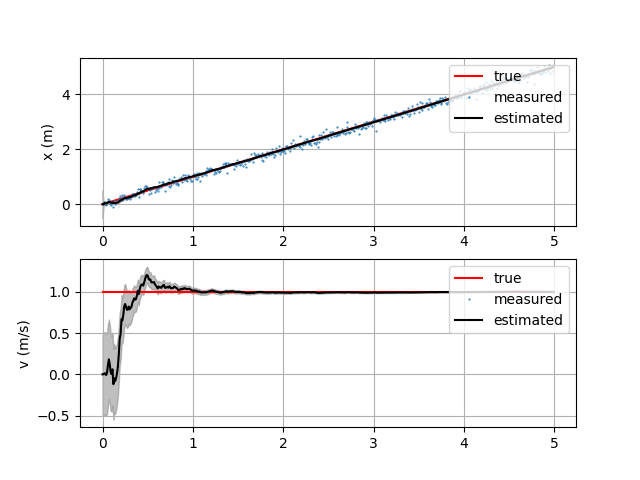
Target moves at a constant speed of 1m/sec. Only position measurements are supplied. This is the case, for example when using motion capture system (velocity information is not available). Kalman filter is able to recover velocity correctly.
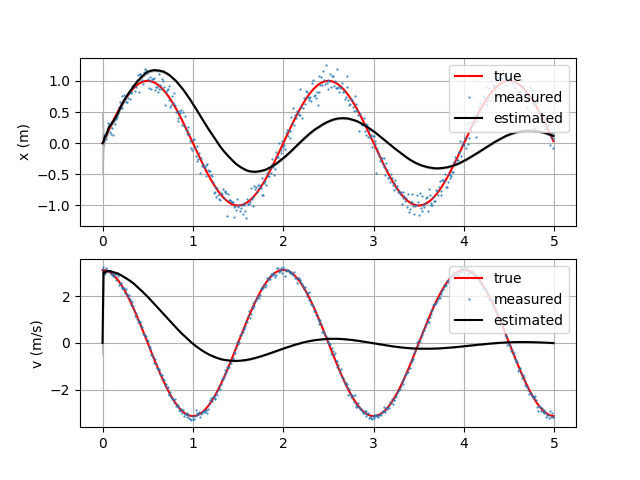
Target moves in a sine wave of 0.5Hz with 1m amplitude. Tracking fails because we are using a constant velocity model with zero process noise. A solution is to use a different model or use non-zero process noise.
It is assumed that filter.py is placed in the same folder as the below script.
import matplotlib.pyplot as plt import numpy as np import filter random_generator = np.random.default_rng(0) def plot(t, ground_truth, gnss, estimated): estimated_x = np.array(estimated['x']) estimated_v = np.array(estimated['v']) x_std = np.array(estimated['x_std']) v_std = np.array(estimated['v_std']) fig, axs = plt.subplots(2, 1) axs[0].plot(t, ground_truth['x'], color='red', label='true') axs[0].plot(t, gnss['x'], '.', markersize=1, label='measured') axs[0].plot(t, estimated_x, color='black', label='estimated') axs[0].fill_between(t, estimated_x-x_std, estimated_x+x_std, color='gray', alpha=0.5) axs[0].grid(True) axs[0].legend(loc='upper right') axs[0].set_ylabel('x (m)') axs[1].plot(t, ground_truth['v'], color='red', label='true') axs[1].plot(t, gnss['v'], '.', markersize=1, label='measured') axs[1].plot(t, estimated_v, color='black', label='estimated') axs[1].fill_between(t, estimated_v-v_std, estimated_v+v_std, color='gray', alpha=0.5) axs[1].grid(True) axs[1].legend(loc='upper right') axs[1].set_ylabel('v (m/s)') plt.show() def estimate(t, gnss): N = len(t) result = { 'x' : [None] * N, 'v' : [None] * N, 'x_std': [None] * N, 'v_std': [None] * N } kf = filter.KF() result['x'][0] = kf.x[0, 0] result['v'][0] = kf.x[1, 0] result['x_std'][0] = np.sqrt(kf.P[0, 0]) result['v_std'][0] = np.sqrt(kf.P[1, 1]) for i in range(1, N): dt = t[i] - t[i-1] kf.predict(dt) if ~np.isnan(gnss['x'][i]): kf.update_pos(gnss['x'][i], gnss['x_std'][i]) if ~np.isnan(gnss['v'][i]): kf.update_vel(gnss['v'][i], gnss['v_std'][i]) result['x'][i] = kf.x[0, 0] result['v'][i] = kf.x[1, 0] result['x_std'][i] = np.sqrt(kf.P[0, 0]) result['v_std'][i] = np.sqrt(kf.P[1, 1]) return result def generate_test1_data(): # Generate time dt = 0.01 t = np.arange(0, 5, 0.01) # Generate ground truth data # Position stationary x0 = 1 ground_truth = {} ground_truth['x'] = 0 * t + x0 ground_truth['v'] = np.gradient(ground_truth['x'], t) ground_truth['a'] = np.gradient(ground_truth['v'], t) # Generate GNSS sensor data stdev = 0.1 gnss = { 'x' : random_generator.normal(ground_truth['x'], stdev), 'x_std': [stdev] * len(t), 'v' : random_generator.normal(ground_truth['v'], stdev), 'v_std': [stdev] * len(t) } return t, ground_truth, gnss def generate_test2_data(): # Generate time dt = 0.01 t = np.arange(0, 5, dt) # Generate ground truth data # Position stationary x0 = 1 ground_truth = {} ground_truth['x'] = 0 * t + x0 ground_truth['v'] = np.gradient(ground_truth['x'], t) # Generate GNSS sensor data stdev = 0.1 gnss = { 'x' : random_generator.normal(ground_truth['x'], stdev), 'x_std': [stdev] * len(t), 'v' : random_generator.normal(ground_truth['v'], stdev), 'v_std': [stdev] * len(t) } # Remove GNSS data betweeen 1 to 4 seconds for i in range(len(t)): if t[i] > 1 and t[i] < 4: gnss['x'][i], gnss['x_std'][i] = np.nan, np.nan gnss['v'][i], gnss['v_std'][i] = np.nan, np.nan return t, ground_truth, gnss def generate_test3_data(): # Generate time dt = 0.01 t = np.arange(0, 5, dt) # Generate ground truth data # Position moving at constant velocity v = 1 ground_truth = {} ground_truth['x'] = v * t ground_truth['v'] = np.gradient(ground_truth['x'], t) # Generate GNSS sensor data stdev = 0.1 gnss = { 'x' : random_generator.normal(ground_truth['x'], stdev), 'x_std': [stdev] * len(t), 'v' : random_generator.normal(ground_truth['v'], stdev), 'v_std': [stdev] * len(t) } return t, ground_truth, gnss def generate_test4_data(): # Generate time dt = 0.01 t = np.arange(0, 5, dt) # Generate ground truth data # Position moving at constant velocity v = 1 ground_truth = {} ground_truth['x'] = v * t ground_truth['v'] = np.gradient(ground_truth['x'], t) # Generate GNSS sensor data (only position) stdev = 0.1 gnss = { 'x' : random_generator.normal(ground_truth['x'], stdev), 'x_std': [stdev] * len(t), 'v' : [np.nan] * len(t), 'v_std': [np.nan] * len(t) } return t, ground_truth, gnss def generate_test5_data(): # Generate time dt = 0.01 t = np.arange(0, 5, dt) # Generate ground truth data # Position moving in sine wave f = 0.5 ground_truth = {} ground_truth['x'] = np.sin(2 * np.pi * f * t) ground_truth['v'] = np.gradient(ground_truth['x'], t) # Generate GNSS sensor data stdev = 0.1 gnss = { 'x' : random_generator.normal(ground_truth['x'], stdev), 'x_std': [stdev] * len(t), 'v' : random_generator.normal(ground_truth['v'], stdev), 'v_std': [stdev] * len(t) } return t, ground_truth, gnss # Generate test data #t, ground_truth, gnss = generate_test1_data() #t, ground_truth, gnss = generate_test2_data() #t, ground_truth, gnss = generate_test3_data() #t, ground_truth, gnss = generate_test4_data() t, ground_truth, gnss = generate_test5_data() # Estimate with Kalman filter estimated = estimate(t, gnss) # Graph result plot(t, ground_truth, gnss, estimated)