PID control is a feedback method used to control systems. Its benefits, mathematical form, and effects of each term are discussed below.
PID control considers past, current, and the future behavior of the system.
Since PID is a linear controller, its behavior can be explained and analyzed logically. For example, it is possible to explain the effects of changing PID parameters. It is also possible to analyze whether the system stays stable when its characteristics change. These are difficult with counterparts such as fuzzy control and neural network.
The effects of each PID parameter can be explained qualitatively.
PID controller can be fine-tuned on-site. It is usually difficult to make a model that perfectly matches the actual process. Having the ability to adjust the controller after deployment is an important factor to consider.
Standard form:

| m(t) | Control output |
| e(t) | Error
|
| PB | Proportional band (%) |
| TI | Integral time |
| TD | Derivative time |
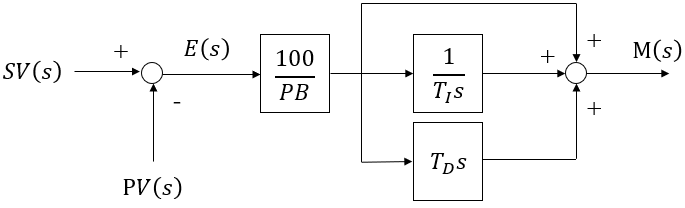
Laplace form:

Block diagram:
Proportional-only controller:
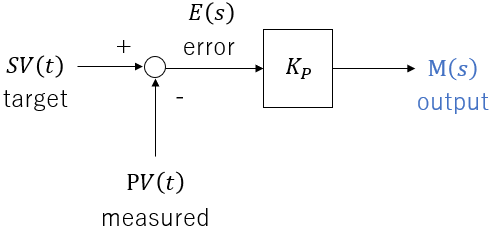
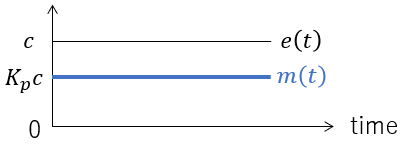
If there is a constant error c, the proportional controller keeps outputting a value proportional to that error.
Intagral-only controller:.
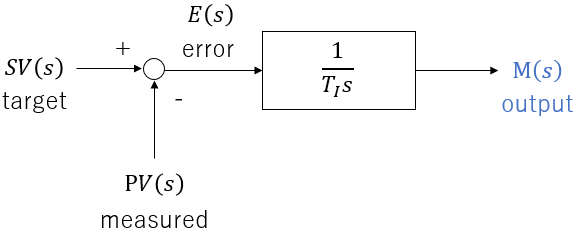
If there is a constant error c, the integrator controller outputs a value that increases over time. The rate at which the output increases is proportional to the error:
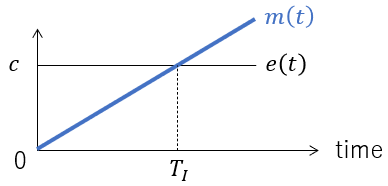
Output as a function of time:

m(TI) = c so TI can be interpreted as the time it takes for the integrator output to reach c.
Integrator strength increases as TI becomes smaller.
Derivative-only controller:
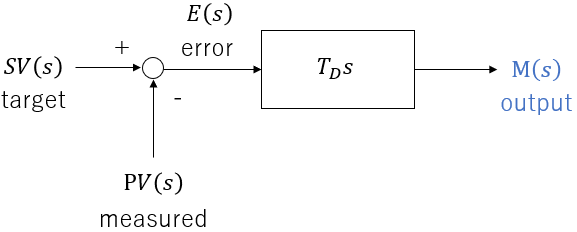
If there is a constant error that increases at a constant rate c, then the controller outputs a value that is proportional to this rate:
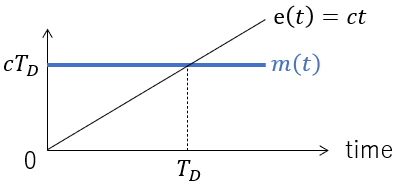
Output as a function of time:

e(TD) = cTD can be interpreted as the time it takes for the error to match the derivative controller output (assuming an error that increases at a constant rate).
Derivative strength increases as TD becomes larger.