Control System Representations
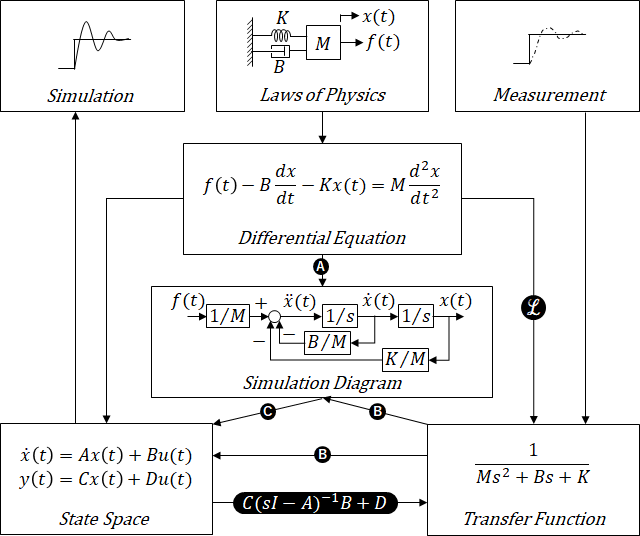
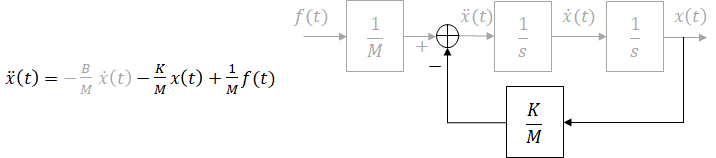
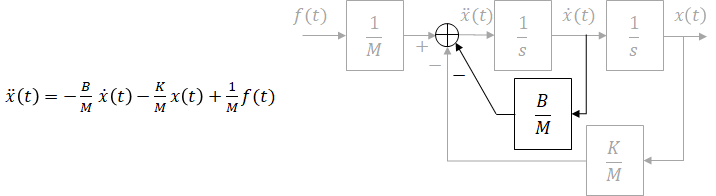
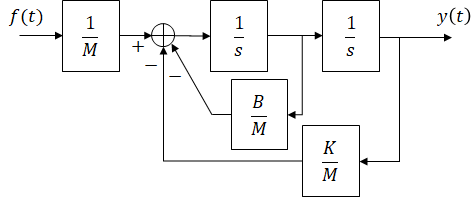
A: Differential Equation to Simulation Diagram

-
Cascade integrators

-
Add input

-
Use summing junction
-
Use summing junction
B: Transfer Function to State Space and Simulation Diagram
See Control and Observer Canonial Forms.
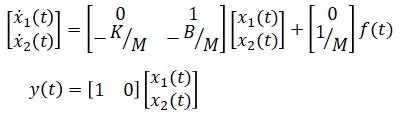
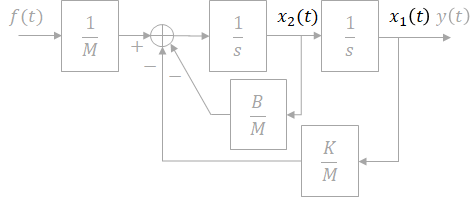
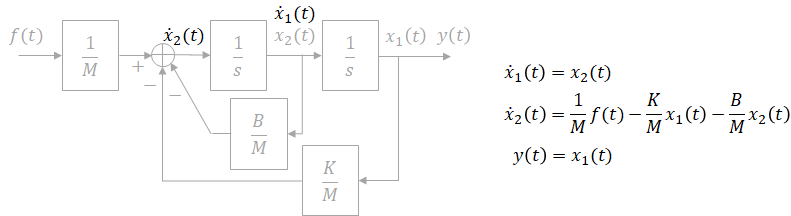
C: Simulation Diagram to State Space
-
Set state variable to output of each integrator
-
Create equations for input of each integrator and system output
-
Rearrange in matrix format